A mano a mano che l’Industria 4.0 continua a evolversi, la richiesta da parte del mercato di livelli più elevati di automazione nella produzione tradizionale e nelle apparecchiature industriali è in crescita. Per garantire precisione e affidabilità a livello di sistema, molte di queste applicazioni richiedono di misurare la posizione assoluta. Sono molteplici i fattori da considerare nella scelta della giusta tecnologia di misurazione della posizione per una data applicazione, in particolare l’accuratezza della misurazione, la velocità dell’oggetto, i requisiti di alimentazione, le esigenze di calibrazione, la flessibilità per supportare svariate configurazioni e l’affidabilità. Vediamo come i sensori di posizione lineare 3D a effetto Hall possono risolverle con un elevato livello di prestazioni.
Indice degli argomenti
Raggiungere elevata precisione ad alte velocità
Per ottenere la massima precisione possibile, spesso è necessario che un sistema operi a velocità inferiore, il che riduce le prestazioni del sistema. Per le applicazioni che richiedono un controllo rapido e in tempo reale (come misurazioni ad alta precisione e velocità) la riduzione delle prestazioni del sistema non è un’opzione valida. Una delle applicazioni con questi requisiti è un sistema di trasporto motorizzato, noto anche come motore lineare. Un motore lineare è costituito da un sistema di binari intelligenti con microcontroller integrati (MCU) che consentono il posizionamento indipendente di ciascun motore. Questa configurazione di sistema offre molteplici vantaggi per il controllo dell’automazione, tra cui elevate velocità di trasferimento, un posizionamento preciso e la capacità di spostare i prodotti avanti e indietro sulla linea in modo da aumentare l’efficienza di produzione.
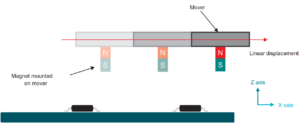
I motori lineari utilizzano una serie di sensori per tracciare la posizione assoluta di un magnete montato sul motore.
Come mostra la Figura 1, i sensori sono posizionati in modo equidistante lungo l’asse X. Il calcolo dell’angolo partendo dalle componenti X e Z dei campi magnetici per mezzo dei sensori di posizione lineari 3D ad effetto Hall adiacenti risolve la posizione assoluta del motore.
Per i sistemi a motore lineare che richiedono precisione e velocità elevate è possibile ridurre gli errori con un sensore di posizione lineare 3D a effetto Hall ad alte prestazioni. Internamente, queste fonti di errore hanno origine a causa della sensibilità, dell’offset, della linearità, del rumore prodotto dalle variazioni di temperatura e del rumore magnetico riferito all’ingresso che si accoppia in ciascun asse. Gli errori indotti dall’esterno provengono da molte fonti: vibrazioni meccaniche, variazioni spaziali involontarie e tolleranze tra il magnete e il sensore, campi magnetici a variazione rapida e misurazioni d’angolo fuori asse.
Un aspetto importante di un sensore di posizione lineare 3D a effetto Hall ad alte prestazioni è un calcolatore digitale di rotazione delle coordinate dell’angolo integrato (CORDIC) che esegue approssimazioni trigonometriche iterative in uno spazio bidimensionale per calcolare sia l’angolo che la grandezza, ottenendo una risoluzione di 0,25 gradi. L’esecuzione di questo calcolo sul dispositivo elimina la necessità di post-elaborazione delle informazioni magnetiche.
I campi magnetici in rapido cambiamento sono problematici per i sensori di posizione lineari 3D ad effetto Hall che non dispongono di percorsi di segnale interni indipendenti e che comprendono la misurazione ad asse singolo, la regolazione del guadagno, il filtraggio e la conversione dei dati. Per ridurre gli errori, la soluzione migliore è offerta dai sensori di posizione 3D ad effetto Hall con un singolo convertitore di dati e con una funzione detta campionamento pseudo-simultaneo.
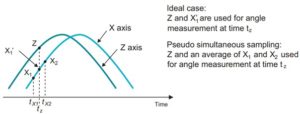
La Figura 2 mostra le circostanze ideali in cui il campionamento di Z e X1′ si verifica nella stessa istanza nel tempo. Con campi magnetici variabili e con un unico percorso del segnale per effettuare le misurazioni, tuttavia, questo non è possibile. Con il campionamento pseudo-simultaneo, una media della componente X subito prima e subito dopo X1′ (contrassegnata rispettivamente con X1 e X2) viene utilizzata come valore dell’asse X che corrisponde a Z. Ipotizzando che i cambiamenti nei campi B siano relativamente lineari su piccoli intervalli, i risultati sono simili al campionamento contemporaneo di entrambi gli assi.
I sensori di posizione lineari 3D ad effetto Hall ospitano generalmente tecnologie di sensori che consentono il rilevamento di campi magnetici sia nel piano che perpendicolarmente al package. Trattandosi di due sensori distinti, il rumore magnetico per ciascuno di essi è diverso. Pertanto, è opportuno equalizzare il rumore di fondo mediando i campioni di ciascun asse. Un sensore di posizione lineare 3D a effetto Hall che può fare la media di un massimo di 32 campioni riduce sensibilmente il rumore di fondo.
Un sensore di posizione 3D a effetto Hall ad alta precisione in grado di eseguire misurazioni precise ad alte velocità è molto utile per questa applicazione.
Ottimizzazione del consumo energetico
Garantire una precisione e una velocità di misurazione sufficienti consumando la minor quantità di energia possibile è importante anche per i sistemi di monitoraggio del movimento o della posizione. Si tratta di una condizione fondamentale per i sistemi alimentati a batteria o a bassa potenza, in cui il consumo di energia del sensore magnetico potrebbe utilizzare una parte notevole della potenza totale di un sistema. Un esempio di questo è un monitor remoto per un reparto in fabbrica che comunica con un controllore a logica programmabile tramite un loop da 4 a 20 mA.
Altri esempi di applicazioni a batteria o a bassa potenza sono i sensori per porte e finestre utilizzati nei sistemi di sicurezza degli edifici o di casa. Un sensore per porta con rilevamento dell’angolo può rilevare un evento di apertura e chiusura e misurare di quanto si è aperta la porta. È possibile implementare questa capacità con un magnete ad anello e un sensore di posizione lineare 3D a effetto Hall integrato in una cerniera tradizionale per porte (vedere la Figura 2). Per applicazioni a bassa potenza, i sensori di posizione lineari 3D a effetto Hall devono essere posizionati in una modalità con duty cycle a bassa potenza che operi a basse frequenze pari a 5 Hz o meno.
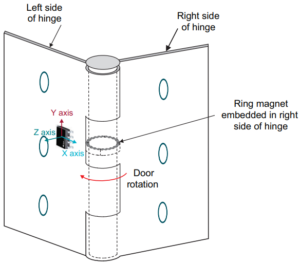
Un ulteriore vantaggio dato dall’utilizzo di un sensore di posizione lineare 3D ad effetto Hall in questa applicazione è che solo due assi di sensibilità provvedono al monitoraggio dell’angolo, consentendo l’uso del terzo asse per rilevare manomissioni magnetiche o la disattivazione da parte di malintenzionati, come il posizionamento di un magnete sul sensore per ingannare il sistema facendogli credere che la porta sia ancora chiusa.
Sensori di posizione: maggiore flessibilità
Il singolo e più importante aspetto da considerare per la progettazione con un sensore a effetto Hall è il posizionamento del sensore rispetto al magnete. La mancanza di flessibilità per il posizionamento del sensore può far sì che il prodotto finale abbia un fattore di forma indesiderato. Poiché spesso i vari aspetti meccanici dei nuovi progetti non sono ben definiti nelle prime fasi del processo di progettazione, i sensori di posizione lineari 3D a effetto Hall devono avere caratteristiche configurabili, come intervalli di sensibilità magnetica selezionabili, correzione del guadagno e dell’offset, velocità di aggiornamento variabili e compensazione della temperatura.
In generale, la rimanenza di un magnete, che indica la densità del flusso magnetico, diminuisce all’aumentare della temperatura. Per migliorare le prestazioni del sistema con diversi tipi di magneti (come magneti al neodimio ferro boro o ferrite), un sensore di posizione lineare 3D ad effetto Hall con compensazione della temperatura offre ulteriore flessibilità.
I motori con sospensione cardanica sono un esempio di applicazione che richiede flessibilità in termini di configurabilità a specifici intervalli di sensibilità o altri parametri. I motori con sospensione cardanica si trovano negli stabilizzatori delle fotocamere portatili e nei droni per fornire all’MCU informazioni sulla misurazione dell’angolo. Questi motori stabilizzano le riprese regolando in continuo la posizione del motore quando si verifica il movimento. Un sensore in grado di misurare gli angoli in modo preciso e accurato offrendo allo stesso tempo posizionamenti in asse o fuori asse (vedere la Figura 3-1) offre flessibilità meccanica per il posizionamento tra magnete e sensore.

L’interfaccia con le persone e i controlli in elettrodomestici, apparecchiature di test e misurazione ed elettronica personale (vedere la Figura 3) traggono vantaggio dalla capacità di un sensore di posizione lineare 3D ad effetto Hall di misurare con precisione i campi magnetici quando si gira il quadrante. Le informazioni sul campo magnetico vengono utilizzate per calcolare la posizione angolare tra due dimensioni qualsiasi (XY, YZ o ZX). Oltre alla possibilità di implementare una funzione push mediante il monitoraggio di un ampio spostamento nelle componenti X e Y, la sensibilità 3D offre la capacità di rilevare il disallineamento dalla configurazione ideale (monitorando il terzo asse Z inutilizzato), fornendo quindi avvisi per la manutenzione predittiva dovuta all’usura o al danneggiamento del quadrante.
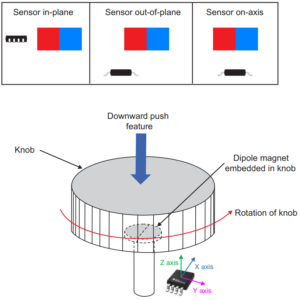
Quando si calcolano le misurazioni dell’angolo di alberi in rotazione, le misurazioni sull’asse (dove il sensore è posto direttamente al di sotto o al di sopra del magnete rotante) forniscono le misurazioni del campo magnetico più accurate, dati i vettori di campo di grandezza equivalente. Nel caso dell’interfaccia con le persone e della manopola di controllo mostrate in Figura 4, tuttavia, un’implementazione in asse non è fattibile in quanto l’albero costituisce un ostacolo al posizionamento del sensore. Monitorando le componenti X e Y, i campi magnetici sono rappresentati dalle funzioni seno e coseno e consentono quindi di calcolare l’angolo tra loro utilizzando la funzione arcotangente.
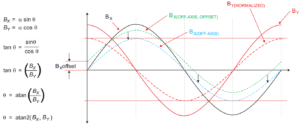
I campi magnetici prodotti da un magnete rotante a velocità costante
La Figura 5 mostra i campi magnetici prodotti da un magnete rotante a velocità costante, come in un quadrante. BX rappresenta il campo magnetico in direzione X, mentre BY è in direzione Y. Queste forme d’onda seno e coseno, BX e BY, sono rappresentative di una misurazione in asse.
Le implementazioni fuori dal piano (precedentemente mostrate in Figura 4) aggiungono complessità al calcolo dell’angolo date le diverse intensità del campo magnetico. In questo caso, un vettore del campo magnetico può essere di grandezza inferiore rispetto all’altro: questa situazione è mostrata nella figura come BX(OFF-AXIS) rispetto a BX. Invece di avere due forme d’onda ben gestite, il campo BX(OFF-AXIS) è distorto, il che produce un errore di calcolo dell’angolo.
Un ulteriore aspetto da considerare nella misurazione del campo magnetico è l’offset. Riducendo l’intero set di misurazioni per offset (mostrato dalle tre frecce in basso in Figura 5) e producendo in modo efficace i vettori di campo per BX(OFF-AXIS, OFFSET) che corrispondono a quello di BX(OFF-AXIS) si va a compensare il ridotto offset del campo magnetico e si assicura un calcolo accurato dell’angolo di rotazione. Per semplicità, soltanto un asse di misura ha questo offset: nella realtà, tutti gli assi avranno un offset intrinseco che deve essere compensato. Avendo rimosso l’offset, uno dei vettori di campo deve essere normalizzato in modo che corrisponda all’altro. In questo esempio, normalizzando BY (indicato come BY(NORMALIZED)) in modo da corrispondere a BX(OFF-AXIS) lo si riduce ad una grandezza pari a BX(OFF-AXIS) diviso per BY.
Sensori di posizione: maggiore affidabilità
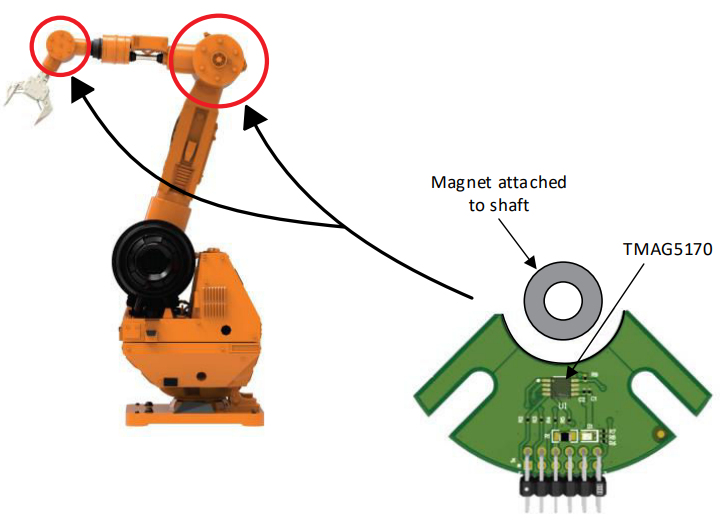
L’automazione industriale ha sempre richiesto prodotti dall’elevata affidabilità. Con l’avvento dell’Industria 4.0, uno schema diagnostico affidabile è fondamentale per azzerare i tempi di fermo o, almeno, per ridurre i tempi di fermo al minimo possibile. Nella maggior parte dei sistemi robotici, un sensore multiasse o un trasduttore di posizione angolare determinano l’angolo di ciascun giunto di un braccio robotico (come mostrato in Figura 6) oppure di ogni ruota in un robot mobile autonomo, garantendo quindi la precisione di movimento e navigazione in tutta la catena di montaggio e all’interno dello stabilimento. A differenza delle soluzioni di codifica ottica suscettibili allo sporco o all’umidità, le prestazioni degli encoder magnetici non subiscono l’influenza di ambienti gravosi.
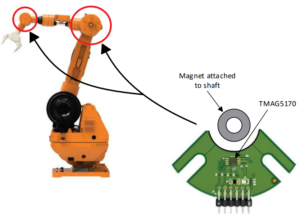
Un sensore che comprenda misure di sicurezza integrate e consenta agli utenti di diagnosticare potenziali problemi che possono sorgere durante il funzionamento è un requisito fondamentale per i sistemi di automazione industriale.
Conclusioni
Tutte le funzionalità esaminate sono realizzabili con un singolo sensore di posizione lineare 3D ad effetto Hall. Un sensore che ha un’elevata precisione ad alte velocità, può essere ottimizzato per il consumo energetico, può eliminare potenzialmente la necessità di calibrazione a livello di sistema, è sufficientemente flessibile per molte applicazioni e molti requisiti e dispone di funzionalità diagnostiche per gli ambienti più esigenti.















